-
Jan31
 3:10pm - 4:10pm, Maricarmen Guerra Paris, Ph.D.
3:10pm - 4:10pm, Maricarmen Guerra Paris, Ph.D.
-
Feb7
 3:10pm - 4:10pm, Kaelyn Gamel, Ph.D.
3:10pm - 4:10pm, Kaelyn Gamel, Ph.D.
-
Feb14
 3:10pm - 4:10pm, Jeonghwa Seo, Ph.D.
3:10pm - 4:10pm, Jeonghwa Seo, Ph.D.
-
Feb21
 3:10pm - 4:10pm, Luciano Fonseca, Ph.D.
3:10pm - 4:10pm, Luciano Fonseca, Ph.D.
-
Feb28
 3:10pm - 4:10pm, Mario Conde Frias
3:10pm - 4:10pm, Mario Conde Frias
-
Mar7
 3:10pm - 4:10pm, Yuri Rzhanov
3:10pm - 4:10pm, Yuri Rzhanov
-
Mar28
 3:10pm - 4:10pm, Longhuan Zhu
3:10pm - 4:10pm, Longhuan Zhu
-
Apr4
 3:10pm - 4:10pm, Val SchmidtPrincipal Research Project ManagerUNH Center for Coastal and Ocean Mapping&Avery MuñozResearch Project EngineerUNH Center for Coastal
3:10pm - 4:10pm, Val SchmidtPrincipal Research Project ManagerUNH Center for Coastal and Ocean Mapping&Avery MuñozResearch Project EngineerUNH Center for Coastal
-
Apr11
 3:10pm - 4:10pm, Martin Wosnik
3:10pm - 4:10pm, Martin Wosnik
-
Apr18
 3:10pm - 4:10pm, Arezoo Hasankhani, Ph.D.
3:10pm - 4:10pm, Arezoo Hasankhani, Ph.D.
-
Apr25
 9:00am - 10:00am, Andrea Granger Master's Thesis Defense Earth Sciences: Ocean MappingFriday, April 25, 2025, 9:00 a.m. EDTRoom 130AbstractSatellite-derived
9:00am - 10:00am, Andrea Granger Master's Thesis Defense Earth Sciences: Ocean MappingFriday, April 25, 2025, 9:00 a.m. EDTRoom 130AbstractSatellite-derived
-
Apr25
 3:10pm - 4:10pm, Jenna Hare, Ph.D.Research Assistant ProfessorCenter for Acoustics Research and EducationCenter for Coastal and Ocean MappingUniversity of New
3:10pm - 4:10pm, Jenna Hare, Ph.D.Research Assistant ProfessorCenter for Acoustics Research and EducationCenter for Coastal and Ocean MappingUniversity of New
-
May2
 3:10pm - 4:10pm, Zeeshan SaeedPh.D. Candidate UNH Department of Mechanical EngineeringFriday, May 2, 2025, 3:10 p.m.Chase 105 AbstractFlows at the water surface, when
3:10pm - 4:10pm, Zeeshan SaeedPh.D. Candidate UNH Department of Mechanical EngineeringFriday, May 2, 2025, 3:10 p.m.Chase 105 AbstractFlows at the water surface, when
-
Jun12
 11:00am - 12:00pm, Kindrat BeregovyiPh.D. StudentComputer ScienceThursday, June 12, 2025, 11:00 a.m.Chase 130 AbstractThis presentation will highlight the development of
11:00am - 12:00pm, Kindrat BeregovyiPh.D. StudentComputer ScienceThursday, June 12, 2025, 11:00 a.m.Chase 130 AbstractThis presentation will highlight the development of
-
Jul31
 1:00pm - 2:00pm, Melanie M. Carolan Master's Thesis DefenseOceanographyThursday, July 31, 2025, 1:00pmChase 130 AbstractThe difficulty of sampling shallow, complex,
1:00pm - 2:00pm, Melanie M. Carolan Master's Thesis DefenseOceanographyThursday, July 31, 2025, 1:00pmChase 130 AbstractThe difficulty of sampling shallow, complex,
-
Aug11
 11:00am - 12:00pm, Constance N. TylerPh.D. CandidateMarine BiologyMonday, August 11, 2025, 11:00 a.m. EDTChase 130 AbstractKelp habitats in the Gulf of Maine are threatened
11:00am - 12:00pm, Constance N. TylerPh.D. CandidateMarine BiologyMonday, August 11, 2025, 11:00 a.m. EDTChase 130 AbstractKelp habitats in the Gulf of Maine are threatened
-
Aug13
 10:00am - 11:00am, Andrew NiedbalaMaster’s Thesis DefenseOcean EngineeringWednesday, August13, 2025, 10:00 a.m.Chase 130 AbstractSeafloor sediment characterization is of
10:00am - 11:00am, Andrew NiedbalaMaster’s Thesis DefenseOcean EngineeringWednesday, August13, 2025, 10:00 a.m.Chase 130 AbstractSeafloor sediment characterization is of
-
Aug22
 1:00pm - 2:00pm, Kaan CavThesis DefenseMaster of EngineeringFriday, August 22, 2025, 1:00pmChase 130AbstractMulti-angle measurements of high frequency seafloor acoustic
1:00pm - 2:00pm, Kaan CavThesis DefenseMaster of EngineeringFriday, August 22, 2025, 1:00pmChase 130AbstractMulti-angle measurements of high frequency seafloor acoustic
-
Sep5
 3:10pm - 4:10pm, Shantanu SoumyaPh.D. StudentMechanical EngineeringUniversity of New HampshireAbstractVelocity gradients are critical drivers of turbulent and scalar exchange
3:10pm - 4:10pm, Shantanu SoumyaPh.D. StudentMechanical EngineeringUniversity of New HampshireAbstractVelocity gradients are critical drivers of turbulent and scalar exchange
-
Sep12
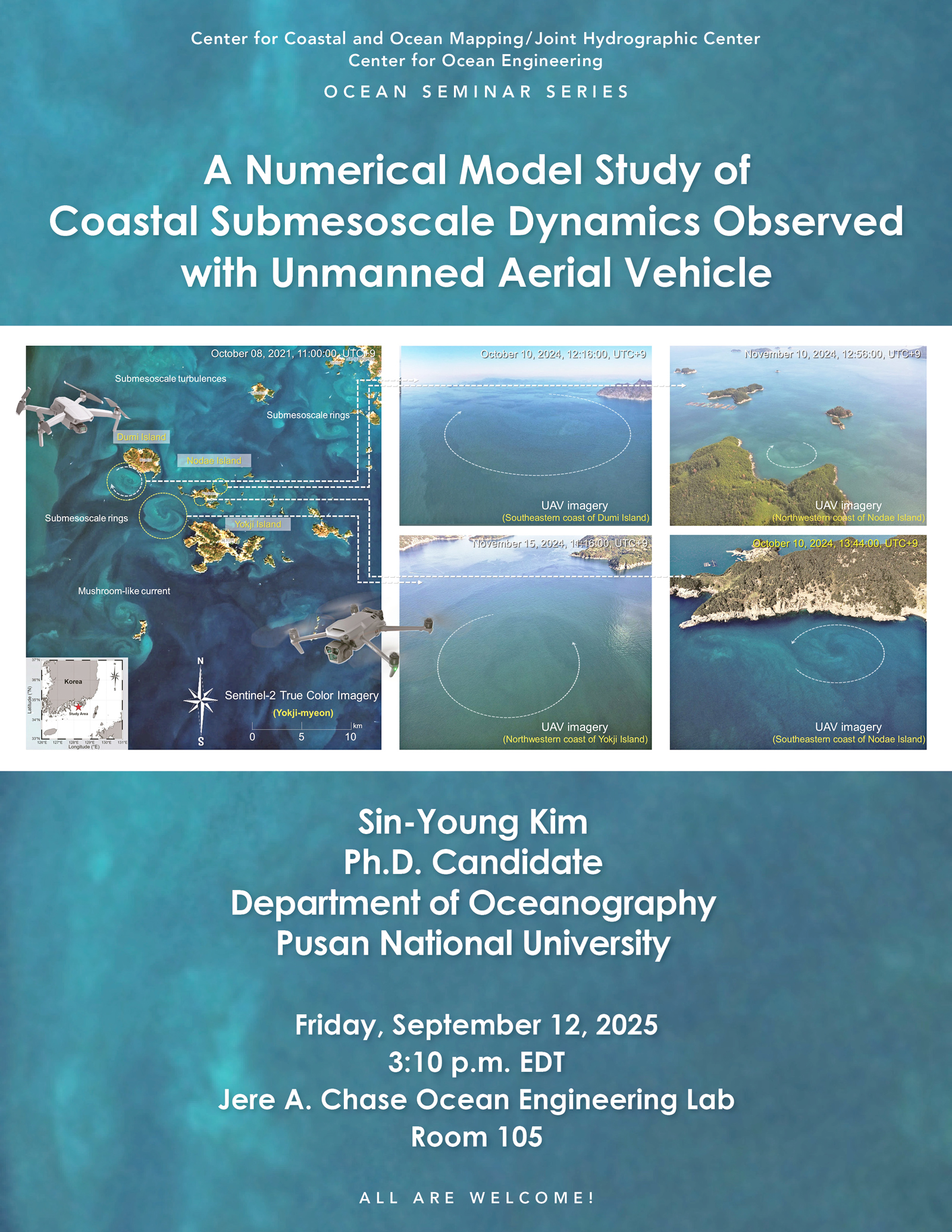 3:10pm - 4:10pm, Sin-Young KimPh.D. CandidateDepartment of OceanographyPusan National UniversityFriday, September 12, 2025, 3:10pmChase 105 AbstractSubmesoscale oceanic
3:10pm - 4:10pm, Sin-Young KimPh.D. CandidateDepartment of OceanographyPusan National UniversityFriday, September 12, 2025, 3:10pmChase 105 AbstractSubmesoscale oceanic
-
Sep19
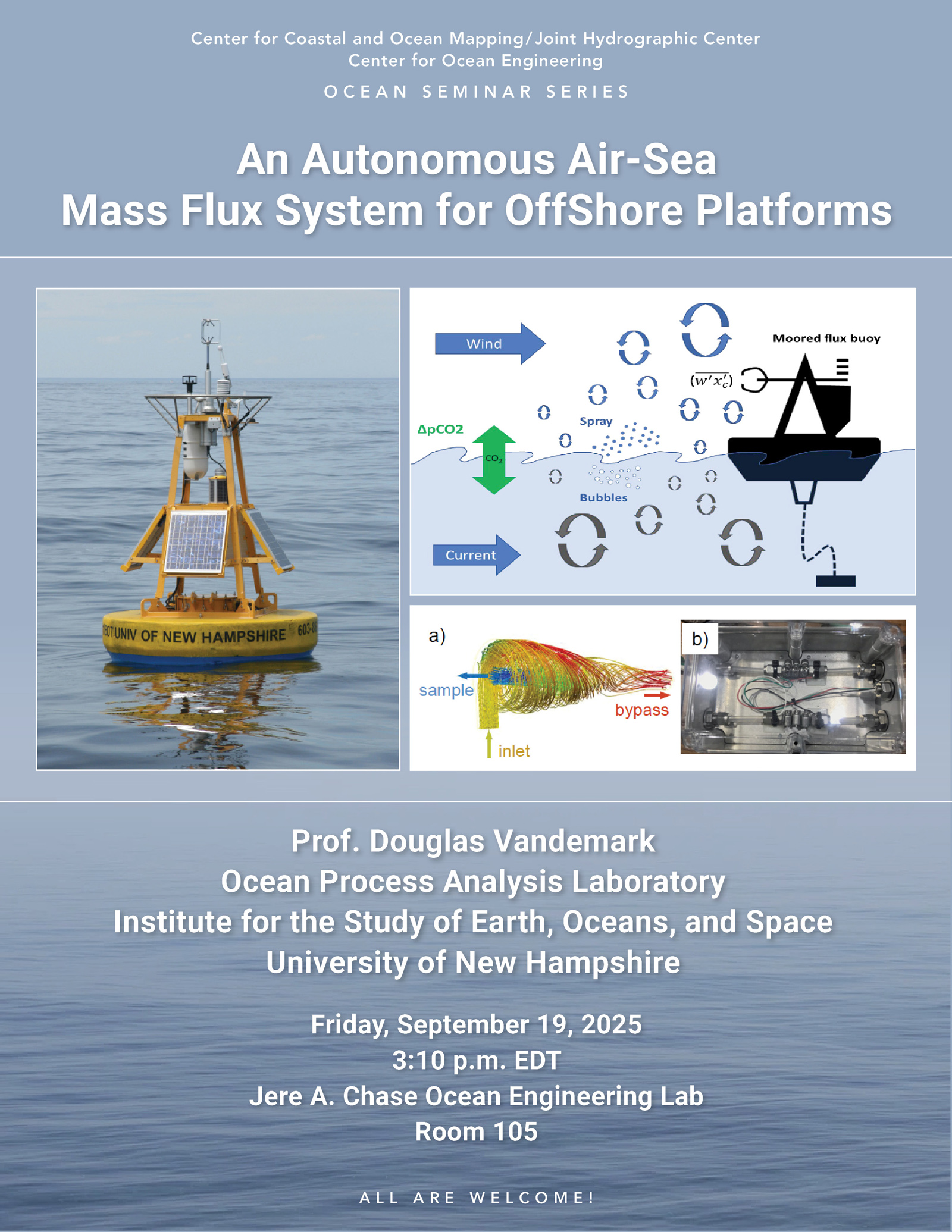 3:10pm - 4:10pm, Douglas VandemarkResearch ProfessorOcean Process Analysis LaboratoryUNH Institute for the Study of Earth, Oceans, and SpaceFriday, September 19, 2025,
3:10pm - 4:10pm, Douglas VandemarkResearch ProfessorOcean Process Analysis LaboratoryUNH Institute for the Study of Earth, Oceans, and SpaceFriday, September 19, 2025,
-
Sep26
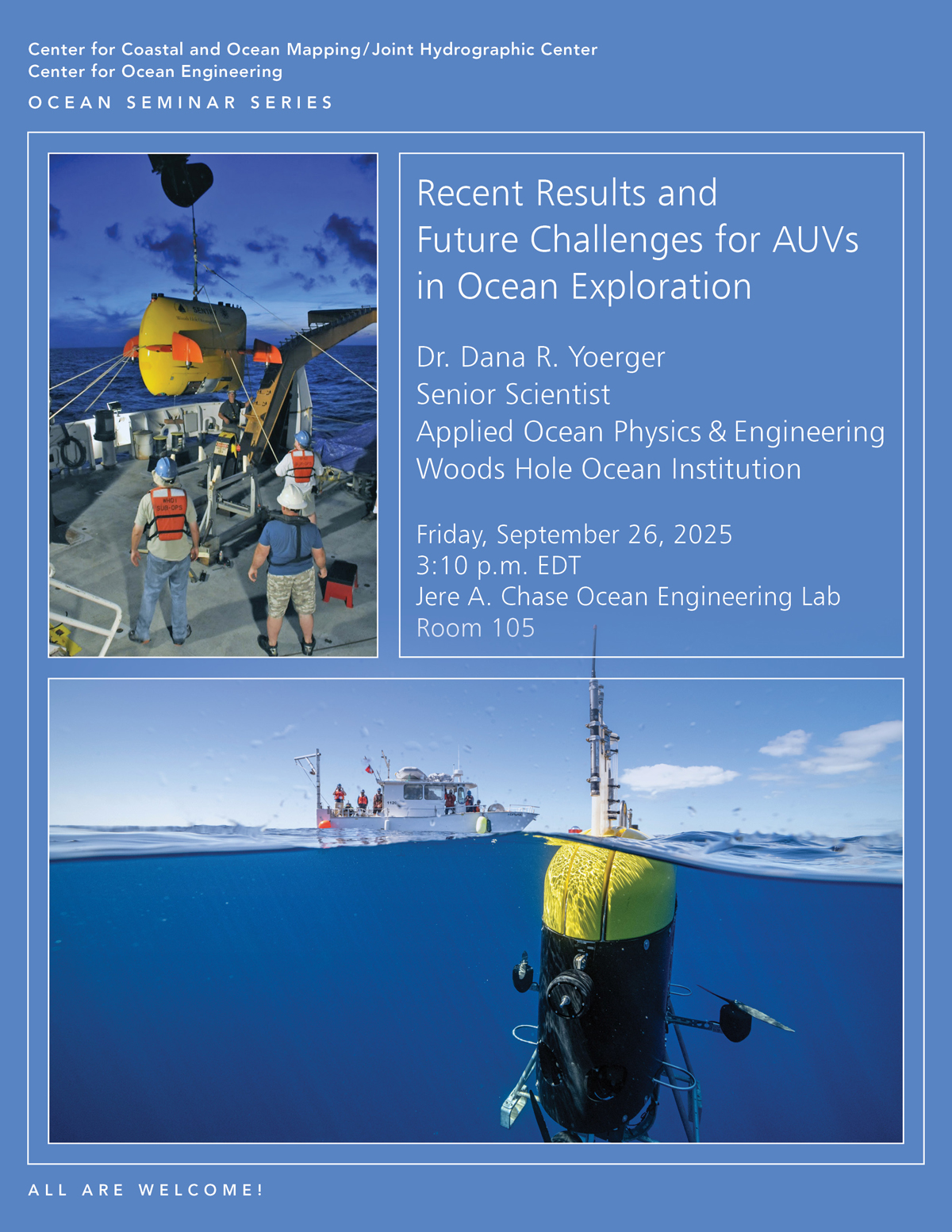 3:10pm - 4:10pm, Dr. Dana R. YoergerSenior ScientistDept. of Applied Ocean Physics and EngineeringWoods Hole Oceanographic InstitutionFriday, September 26, 2025, 3:10pmChase
3:10pm - 4:10pm, Dr. Dana R. YoergerSenior ScientistDept. of Applied Ocean Physics and EngineeringWoods Hole Oceanographic InstitutionFriday, September 26, 2025, 3:10pmChase
Center for Coastal and Ocean Mapping/Joint Hydrographic Center
- About Show About submenu
-
Research
Show Research submenu
-
Research Areas
Show Research Areas submenu
- Autonomous Systems
- AUVs
- Chart of the Future
- Coastal Processes
- Data Processing Show Data Processing submenu
- Data Visualization
-
Law of the Sea
Show Law of the Sea submenu
- All Reports
- Arctic Ocean Show Arctic Ocean submenu
- Atlantic Margin Show Atlantic Margin submenu
- Bering Sea - Beringian Margin Show Bering Sea - Beringian Margin submenu
- Bering Sea - Bowers Ridge Show Bering Sea - Bowers Ridge submenu
- Florida Escarpment Show Florida Escarpment submenu
- Gulf of Alaska Margin Show Gulf of Alaska Margin submenu
- Johnston Atoll, Pacific Ocean Show Johnston Atoll, Pacific Ocean submenu
- Line Islands, Kingman Palmyra, Pacific Ocean Show Line Islands, Kingman Palmyra, Pacific Ocean submenu
- Mariana Trench and West Mariana Ridge, Pacific Ocean Show Mariana Trench and West Mariana Ridge, Pacific Ocean submenu
- Mendocino Ridge, Pacific Ocean Show Mendocino Ridge, Pacific Ocean submenu
- Necker Ridge, Pacific Ocean Show Necker Ridge, Pacific Ocean submenu
- Sigsbee Escarpment Show Sigsbee Escarpment submenu
- Lidar
- Nautical Cartography Show Nautical Cartography submenu
- Seafloor Characterization
- Sonar Capabilities
- Water Column Mapping
- Research Projects Show Research Projects submenu
-
Research Areas
Show Research Areas submenu
-
Education
Show Education submenu
- FAQs
- CAT A Certificate
- Degree Programs
- Guidelines for Funding Applications
-
NF-GEBCO
Show NF-GEBCO submenu
- Program
-
Scholars
Show Scholars submenu
- Current GEBCO Scholars
- 2024-2025 GEBCO Scholars
- 2023-2024 GEBCO Scholars
- 2022-2023 GEBCO Scholars
- 2021-2022 GEBCO Scholars
- 2020-2021 GEBCO Scholars
- 2019-2020 GEBCO Scholars
- 2018-2019 GEBCO Scholars
- 2017-2018 GEBCO Scholars
- 2016-2017 GEBCO Scholars
- 2015-2016 GEBCO Scholars
- 2014-2015 GEBCO Scholars
- 2013-2014 GEBCO Scholars
- 2012-2013 GEBCO Scholars
- 2011-2012 GEBCO Scholars
- 2010-2011 GEBCO Scholars
- 2009-2010 GEBCO Scholars
- 2008-2009 GEBCO Scholars
- 2007-2008 GEBCO Scholars
- 2006-2007 GEBCO Scholars
- 2005-2006 GEBCO Scholars
- 2004-2005 GEBCO Scholars
- CCOM-SURF
- Outreach Hide Outreach submenu
- Publications
- Resources Show Resources submenu